As we all know, back in June 2020, it was announced the the Prime Minister’s sort-of-private transport was to be repainted in a Union Flag colour scheme, at the cost of £900,000. Yes, arch-clown Alexander Boris dePeffel Johnson, not content with his bus based shennanigans, decided to go for the all important aviation derision too.
The Curse of Half Man Half Biscuit
On November 20th, 1985, the song “D’Ye Ken Ted Moult?” by Half Man Half Biscuit was played on Radio One by John Peel. Less than ten months later, Ted Moult was dead. This was the first strike of a curse that would take many celebrities down.
RSGB TestReach Tutorial
You can get the feel of how the Online system works by using the links below and taking the TestReach tutorial – you can use it as many time as you like and you can pass it on to anyone who’s interested in the exams etc
Navigate to https://rsgb.testreach.com using your usual browser.
Username: testcentrecheck1@testreach.com
Password: rsgb123$TR
Click the ‘Take Tutorial’ tab
You should note that this is the standard TestReach tutorial and in it it mentions a couple of functions that we aren’t using, namely the Resource (Q6) and the Remote Invigilation (Q7) functions.
Thanks to Dave Wilson (M0OBW), for this info.
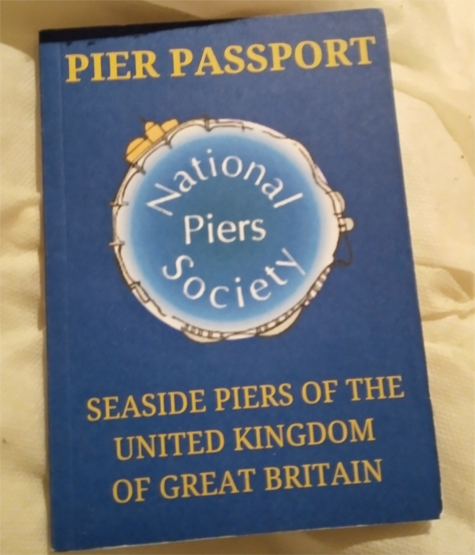
Pier Passport
My new passport arrived in the post today. I will not be using is to travel to exotic foreign destinations, for this in my Pier Passport: a handy guide to the seaside piers of the UK.
Original Gardale Trackplan
As I get ready to start work on Gardale again, I found the original track plan!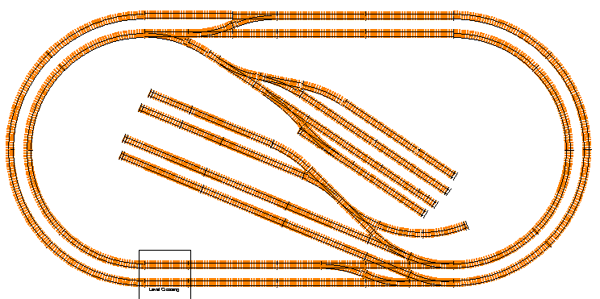
The Stafford to Shrewsbury Railway Line
The Stafford–Shrewsbury line formerly ran between Shrewsbury and Stafford, from 1849 to 1966.

Those paying attention will spot that the little thing above only shows Wellington to Stafford… and for good reason – the line between Shrewsbury and Wellington is still in use, and here I’m only interested in the closed parts.
Maxon PM150

The Boat That Guy Built
I’ve just found the entire series of “The Boat That Guy Built” available in one block on You Tube,
Enjoy two blokes fecking about on a boat, narrated by the sexist voice in the UK: Liza Tarbuck!
Tait 8110 Radio

N Gauge Gardale Layout
This is my 2nd model rail project. I started this when I had a bit more space available than for the first one, but progress has been slow. Mainly because of the cat.