So, I’ve been planning another model railway.
Category Archives: N gauge
The Pack Horse
Back in that time when we weren’t allowed to go to the pub because of Covid-19, I build my own. In miniature.

Gardale Halt – N Gauge model railway – Part 1
So, I’ve decided on ANOTHER mini layout. This one is going to be a 3’x2′ single track roundy roundy with a goods siding and two storage loops behind the backscene – thus allowing me to have three trains to run.
Again?
Preston Dock Engine Shed – First Test
First test version of my card kit of the Preston Dock Engine Shed, just to see if it is feasible.

Preston Dock Engine Shed – Model Project
Down on the old Preston Dock site there is an unusual little engine shed, which was built for Preston Borough Council (long before they became City) in 1985. In 1986 it won The Brick Development Association’s Structural Brickwork Award. It looks like this:

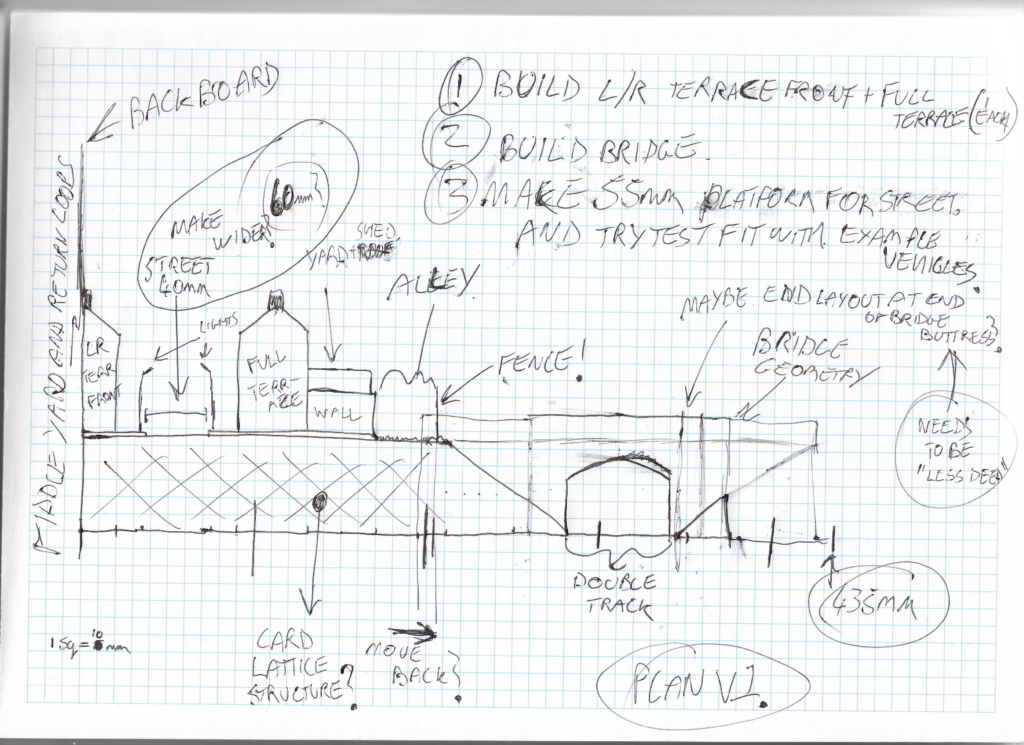
Original Gardale Trackplan
As I get ready to start work on Gardale again, I found the original track plan!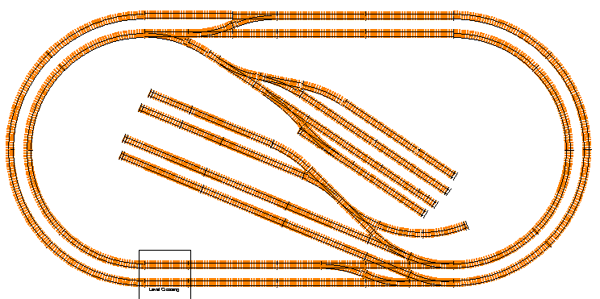
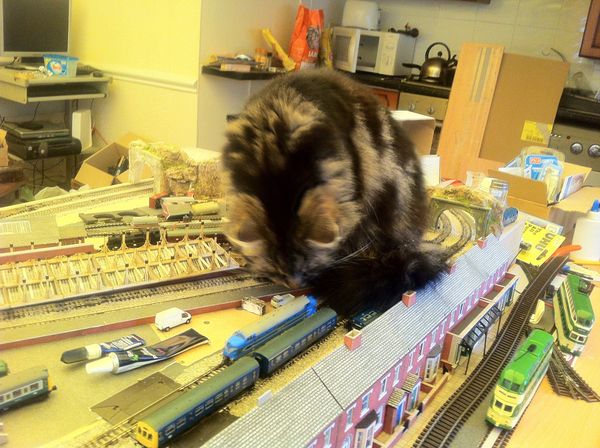
N Gauge Gardale Layout
This is my 2nd model rail project. I started this when I had a bit more space available than for the first one, but progress has been slow. Mainly because of the cat.
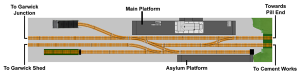
N Gauge Shelf Railway – Garwick
I came up with the idea of “Garwick”, a station on a mainly industrial line which still handles passenger traffic. The layout is based mainly on the long-closed Maudlands station in Preston, but with several additions which “just seemed like good ideas at the time”.